V tomto tutoriálu vám ukážu základy inverzní (IK) a dopřední (FK) kinematiky na jednoduchém modelu bagru, který je ke stažení ZDE.
Trocha teorie
IK používá cílenou mířenou metodu, kde animační pozice dítěte a jeho orientace jsou dopočítávány rodičovskými objekty. Jednoduše řečeno, že při použití této metody se mezi danými objekty vytvoří řetězec zvaný “IK Chain”. Tento řetězec je ovladatelný pouze rodičovským objektem nebo IK bodem.
FK je základní metoda, která využívá hierarchie mezi objekty, které postupným spojováním vytváří tzv. vazbu parent to child, tedy rodič k dítěti . U této metody je důležité nestavení pozice středů otáčení (pivots), protože definují kloubové spojení mezi vazbou. Když provedeme jakoukoli transformaci s objektem, který je rodič celé soustavy, ostatní děti ho budou následovat. Naopak, když provedeme transformaci s nějakým dítětem, rodič nebude následovat tuto transformaci, ale další děti transformovaného objektu ano.
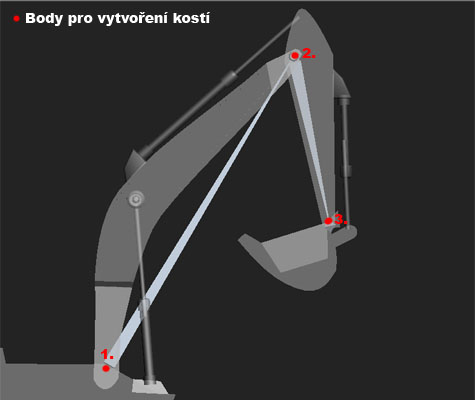
1. Kosti (command panel=>create=>systems=>bones)
Kosti vytvoříme podle obrázku. Pamatujte, že vetší koncová část kosti je středem otáčení, takže je vytvořte tak, aby jejich konce byly na kloubech ramen bagru. Nutno podotknout, že v našem případě k funkčnosti stačí dvě kosti a třetí koncová se vytvoří automaticky stisknutím pravého tlačítka myši.
2.Vazby (main toolbar=>select and link)
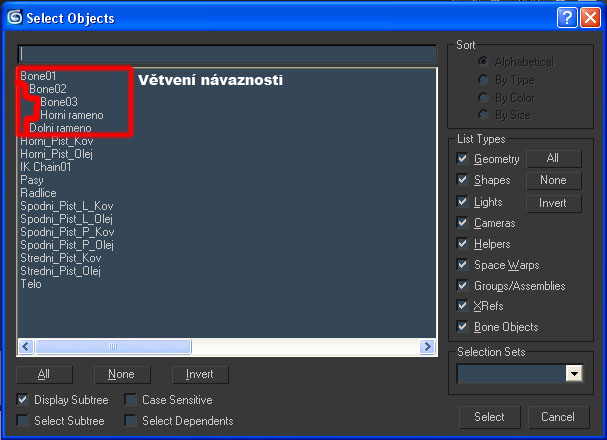
Konečně se dostáváme k propojování vazeb. Toho dosáhneme pomocí nástroje select and link a to tak, že označíme dolní rameno, kliknutím a následovním táhnutím propojíme s „Bone01“ nebo druhý způsob je, že označíme dolní rameno, stiskneme “H” v okně Select Parent klikneme na „Bone01“ a klikneme na “Link”. Je pravidlem, že první označený objekt je vždy dítětem objektu spojeného. Stejnou věc provedeme s horním ramenem a „Bone02“ tak, aby horní rameno bylo opět dítětem od „Bone02“. Při tvorbě kostí jste si mohl všimnout automatických vazeb, které jsou pro kosti dané. Po stisknutí “H” (Pozor! nesmíte mít aktivní nástroj select and link) by se vám měla zobrazit stejná tabulka, ve které si všimněte “větvení”. Objekt úplně nahoře „Bone01“ je vždy rodič celé soustavy. „Bone02“ je dítětem „Bone01“, ale rodičem horního ramena atd.
Nyní vytvoříme vazbu „Bone01“ k objektu “telo“, protože při otáčení bude rodičem právě tělo bagru. Vytvořme si pomocný objekt pro otáčení těla i celého ramena bagru. Pro přehlednost to bude křivka. Create=>Splines=>Circle vytvořte v perspektivním pohledu kruh s těmito parametry: Radius 130, Thickness 15, Sides 6, Steps 6, Display Render Mesh ON. Vycentrujte kruh na tělo pomocí Align (ALT+A) ve všech osách. Schválně jsem zvolil kruhový tvar protože “Circle“ bude hlavním pomocným objektem (křivkou) pro otáčení. Nyní “Circle přejmenujte na “Ovladac osy Z”. Je dobré volit tvary, které jsou intuitivní k dané transformaci. Parametry si můžete dat jaké chcete, ale pro pořádek jsem je raději napsal. Další vazba bude mezi objektem “Telo” a křivkou “Ovladac osy Z” tak, aby křivka byla rodičem.
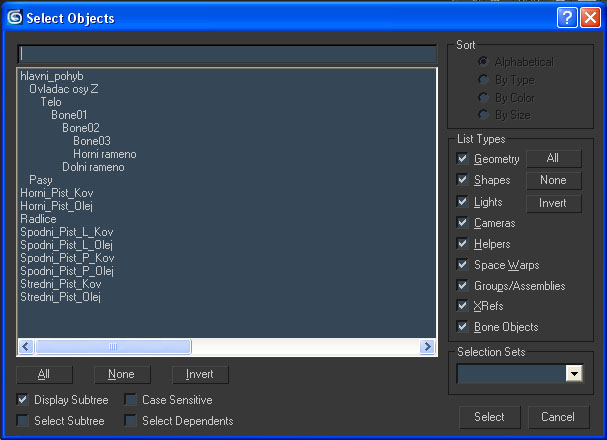
Vytvořte teď další křivku “Circle” se stejnými parametry pouze Steps zvolte na 1, a Radius na 180 . Vycentrujte na “pasy” ve všech osách a přejmenujte křivku na “hlavni_pohyb”. Všimněte si, že pro transformaci pohyb jsem zvolil hranatější tvar, aby bylo jasné, k čemu je určený daný objekt. S “Pasy” vytvořte vazbu s křivkou “hlavni_pohyb” a “Ovladac osy Z” také k “hlavni_pohyb”. Pokud jste postupovali správně, měli bychom mít tuto tabulku z pohledu větvení stejně.
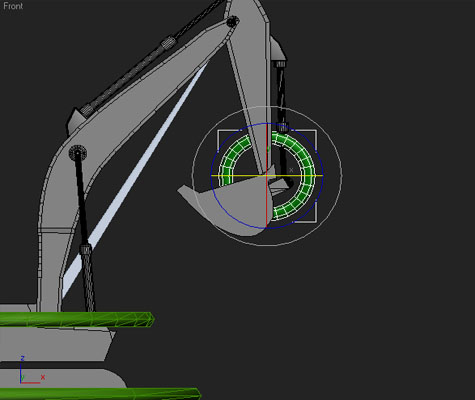
Na řadě je další kulatá křivka, kterou vytvoříme v pohledu „front“ tak, aby střed křivky odpovídal středu otáčení radlice. Pojmenujte ji jako “Ovladac osy Y” Podobně jako na obrázku. Parametry nechám na vás. Nyní vytvořte vazbu radlice k “Ovladac osy Y” a “Ovladac osy Y” k “Horni rameno”.
3. Hydraulika
Jak udělat hydraulické části na stroji si řekneme v tomto odstavci.
Tento postup je pro střední hydrauliku u našeho bagru.
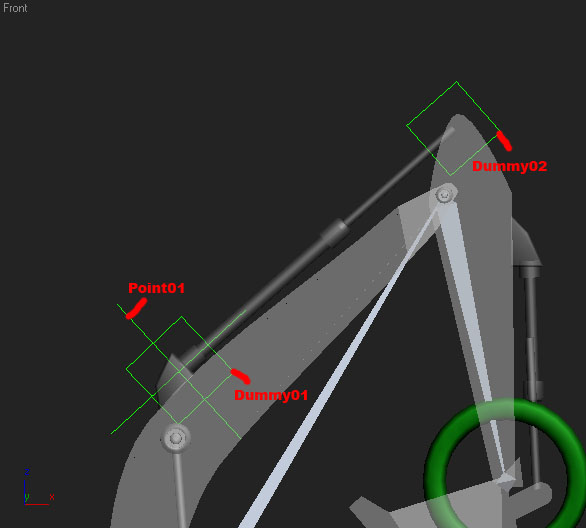
Vytvořme si soustavu pomocných objektů (Create=>Helpers=>Dummy, Point) a to tak, že „dummy“ společně s „point“ helprem na konci olejové (větší) části hydrauliky. Druhý „dummy“ na konci kovové (tenčí) části hydrauliky. Všechny pomocné objekty natočte ve směru hydrauliky, podobně jako na obrázku.
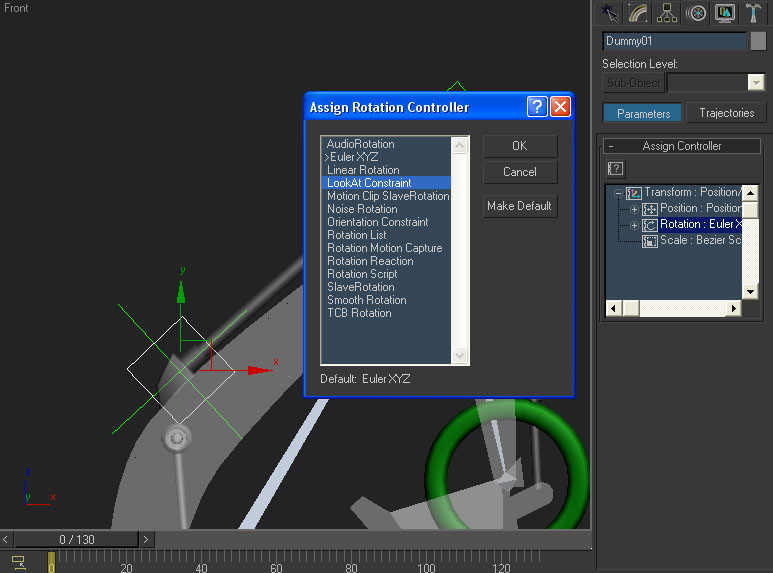
Vyberte „Dummy01“ a v „motion“ panelu mu přiřaďte k rotaci kontrolér „Look At“. Kontrolér přiřaďte i pro „Dummy02“.
Nyní vytvořte vazbu olejovou (větší část) k „Dummy01“ a kovovou (menší část) k „Dummy02“. Vyberte „Dummy01“ a v nastavení „Look At“ zvolte směr pohledu k „Dummy02“ (Add LookAt Target=>Dummy02) se zatrženým políčkem „Keep Initial Offset“. Stejný postup udělejte pro „Dummy02“, aby se díval na „Point01“. Dále vytvořte vazbu „Dummy01“ spolu s „Point01“ k objektu “Dolni rameno”. Vazbu můžete vytvořit i tak, že máte označené oba objekty (Dummy01 spolu s Point01) a přetáhnete na dolní rameno. Ještě vytvořte vazbu „Dummy02“ k objektu “Horni rameno”. Vyzkoušejte rotovat s “Bone02“ a pokud jste udělali všechno správně, hydraulika by měla fungovat. Je důležité pochopit co s čím se bude hýbat, a který objekt bude rodičem. Na základě těchto znalostí vytvořte ovládací soustavy pro zbývající hydrauliku. Možná vám pomůže tento obrázek pro sestavení funkčních vazeb.
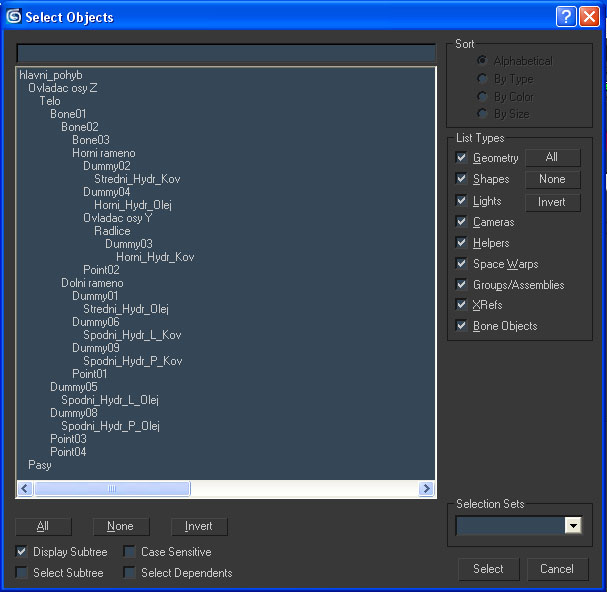
Podotýkám, že vaše názvy pomocných objektů se nemusí shodovat s mým obrázkem. Záleží na pořadí vámi vytvořených soustav pomocných objektů.
4. IK řetězec (animation=>IK solvers=>HI solver)
Označíme „Bone01“ zvolíme „HI solver“ a klikněte na koncový bod, tedy „Bone03“. Vytvoří se modrá čára, která prochází objekty námi zvoleného IK řetězce. Teď si můžete vyzkoušet pomocí koncového bodu pohyb, který je typický pro IK. Musíme přilinkovat „IK Chain01“ k “Ovladac osy Z”, aby při otáčení následoval pohyb. Nyní by měl být bagr plně funkční a pokud tomu tak není, přikládám hotovou scénu, která je ke stažení ZDE.
• Ovládací prvky vyvářejte tak, aby bylo na první pohled jasné, jakou transformaci mají na starosti. Tím máte zajištěno, že animování bude o mnoho rychlejší.
• Jména objektů volte tak, aby jste se ve stromovém zobrazení vyznali.
• V panelu „Main Toolbar“ si všimněte, že si můžete nastavit typy objektů, které lze vybrat z viewportu. Proto volte při vytváření ovladačů soustav třeba křivky, aby jste měli jednodušší výběry a nepletla se vám pod ruku další nepodstatná geometrie při animování.
• Ovladače barevně odlišujte. Například u lidských postav pro pravou ruku červený ovladač, levou modrý a pro torzo zase jinou barvu.
• V panelu Hierarchy=>Link Info uzamykejte ovladačům pohyby a rotace, aby se vám nezaměnily další osy, které nebudete používat.
Doufám, že se vám tutoriál líbil a věřím, že jste pochopili základy inverzní i dopřední kinematiky. Případné dotazy pište na peet13@seznam.cz